深圳市澜起智能科技有限公司-专业单片机方案开发商

深圳市澜起智能科技有限公司-专业单片机方案开发商
Pid抗积分饱和程序
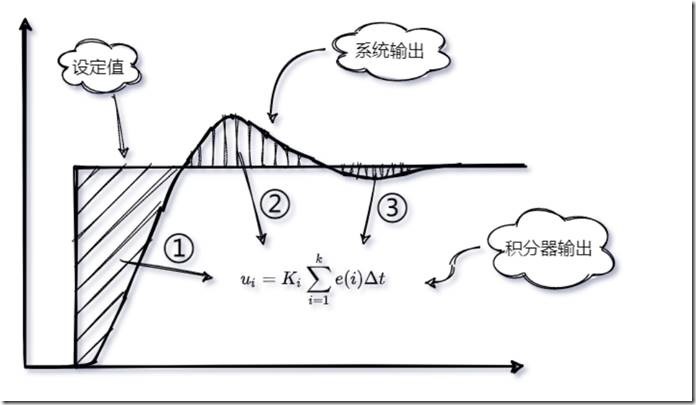
PID概念PID(比例-积分-微分)算法是一种广泛应用在控制工程中的反馈控制算法,主要用于调节系统的输出以达到期望的目标值。PID算法的核心是通过计算并结合三个基本控制动作:比例、...
反正切CORDIC计算

无感无刷电机使用FOC驱动时,需要通过反电动势计算转子电角度θ = arctan (-e α , e β )如果使用math.h的atan()函数,计算量大,耗时长,FOC每次中断...
人心有杆秤
前总理突然逝世,这几天在抖音看到民众自发到总理故居献花,和总理生前到地方视察的影像,刷着刷着眼睛有些湿了。天地之间有杆秤,秤杆子挑江山,那秤砣就是老百姓。真关心老百姓的人,老百姓会...
潜水LED手电筒方案

1、 工作原理潜水手电对密封性要求很高,所以开关采用HALL元件感应磁铁来进行调光。磁铁远离PCB上HALL元件时,第4脚电压变小,靠近PCB上HALL元件时,第4脚电压变高。电压...
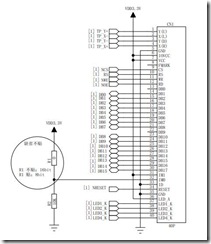
电控锁方案
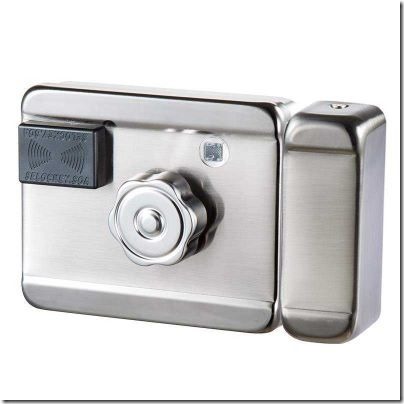
电控锁使用了可靠的机械控制机构 ,精密的步进电机作为驱动源、无碳刷、使用了单片机智能控制的电路系统,具有电子智能控制、自动检测、自动纠正、体积小、功能多、安全可靠等特性。广泛应用于...
4G-IC卡水控机方案

这是一款在学校使用的水控机,可用在教室饮水,宿舍洗澡等场合。在学生卡(IC卡)划分一个扇区,存储金额,刷卡开水阀,消费记录通过4G模块实时上传到后台。1、 工作原理:读卡芯片FM1...
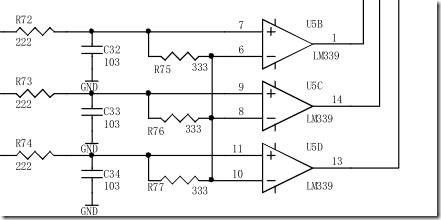
ID卡桑拿柜锁方案

1、 工作原理因为这种产品要求成本低,所以ID卡检测电路部分采用分立元件实现。使用辉芒带内部运放的单片机,PWM脚输出125K信号驱动天线,接收到的ID卡数据通过MCU内部运放放大...
电子闹钟方案

1、 工作原理MCU采用矽杰XC8P9521,该芯片支持双晶振,外接32.768K晶振用来计时,内部8M晶振用来做系统时钟。用TM1668驱动LED。3V纽扣电池用于在外部断电时计...
锂电池小风扇方案

1、 工作原理锂电池供电,采用BOOST升压电路,把电池电压升到5V,7V,8.5V,实现3档调速。BOOST升压电路用矽杰单片机XC8P8613(SOP14-AD型MCU)的PW...
LED手电筒方案

1、 工作原理电路使用3颗芯片,4056充电管理芯片,矽杰XC8P8613(SOP14-AD型MCU),SL8100大功率LED驱动芯片。单按键用来开关和切换工作模式。MCU检测电...
2022 国产MCU厂商综合实力排名及分析

全球和中国MCU市场趋势根据IC Insights最新发布的全球半导体市场预测,尽管各个半导体细分市场此消彼长,但2022年整体增长仍保持在11%,销售额达到创纪录的6807亿美元...
数一数汽车上的电机都用在哪里?
电子发烧友网报道(文/程文智)在去年电子发烧友网举办的电机控制技术研讨会上,小编曾经分享过下面这样一张PPT,谈到了随着汽车电气化和智能化的发展,汽车上用到的电机数量也将会快速增加...