热门搜索:
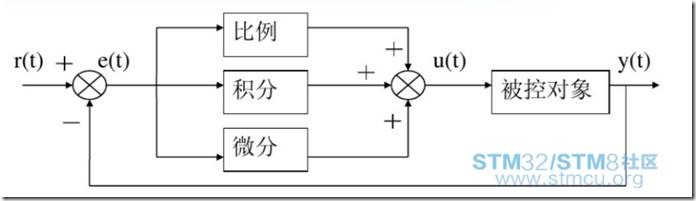
PID算法听起来高大上,理解后实际上是很简单的,实现代码也很小。PID控制是将实际值与目标值的偏差的比例(P),积分(I),微分(D)的线性组合作为控制量,控制被控对象。PID控制...
单片机# PID