包含"foc"的全部内容
无感FOC启动之强拖
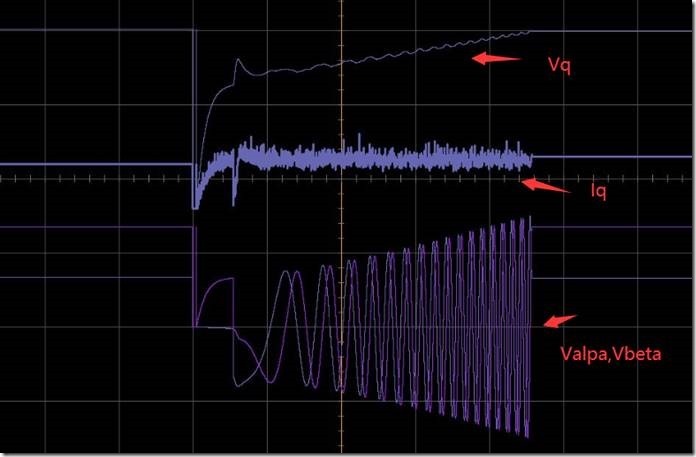
无感FOC启动,定位之后需要强拖,使电机运行到一定速度,产生反电动势后,使用观测器得到反向电动势,然后根据反向电动势计算当前转子的角度和速度。强拖要使能电流闭环,Iqref设定为额...
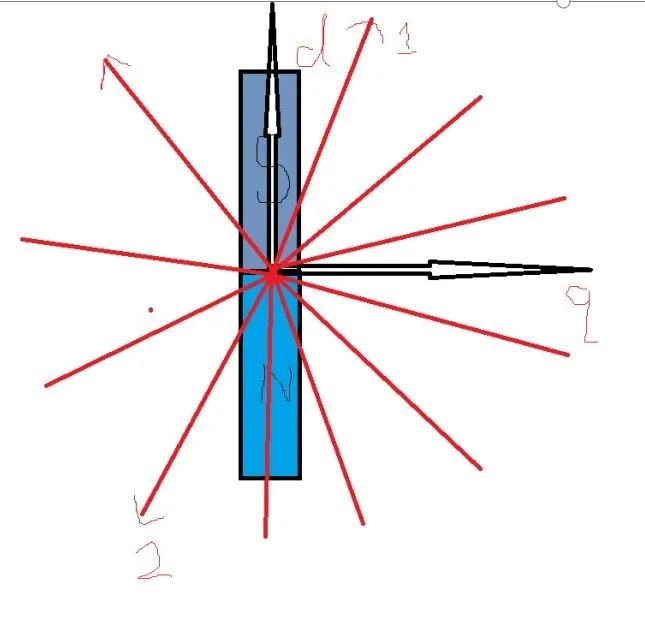
反正切CORDIC计算

无感无刷电机使用FOC驱动时,需要通过反电动势计算转子电角度θ = arctan (-e α , e β )如果使用math.h的atan()函数,计算量大,耗时长,FOC每次中断...
2022 国产MCU厂商综合实力排名及分析

全球和中国MCU市场趋势根据IC Insights最新发布的全球半导体市场预测,尽管各个半导体细分市场此消彼长,但2022年整体增长仍保持在11%,销售额达到创纪录的6807亿美元...
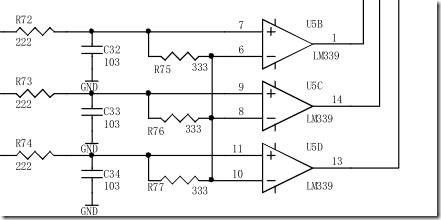
基于脉冲法(IPD)实现转子初始定位
一、原理介绍1.现有方法由于转子的初始位置是随机的,而且矢量控制对于转子的位置要求很高,所以初始位置的检测精度会影响伺服电机的启动效果。我们现有的的检测方法是基于HALL传感器将初...
SVPWM中使用标幺值

标幺值的本质是采用相对值单位系统代替绝对值单位系统。既然是相对值,首先有一个基准,物理量与所选基准的比值就是这个物理量的标幺值。例如某物的长度为1m,意味着该物长度与1m长的基准比...
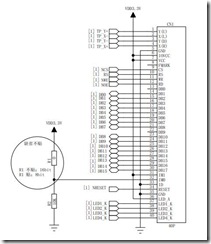
串口扩展芯片VK3214使用总结
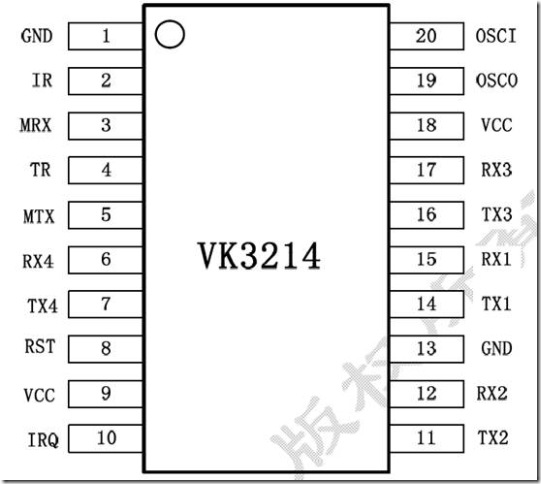
最近一个项目需要用到3个串口,但是用的MCU只有2个串口,选择多串口的单片机成本太高,最后打算用串口扩展芯片VK3214扩展2个串口。 VK3214可以用单片机的一个串口扩展出4个...