登录
注册
找回密码
博客
方案
关于我们
选择分类
ARM
RFID
UCOS-II
一日一图
单片机
方案
未分类
杂文
电机
热门搜索:
0
1
2
3
index
pid
4.5
身份证
api
4
5
FOC
foc
6
pid'
'
PID
标幺
pid''
博客
方案
关于我们
登录
注册
找回密码
单片机
共18篇
分类
ARM
RFID
UCOS-II
一日一图
单片机
方案
未分类
杂文
电机
电机
2022 国产MCU厂商综合实力排名及分析
3年前
0
4146
0
STM8S单脉冲方式和重复计数器
# STM8S
# 单脉冲
5年前
0
3704
0
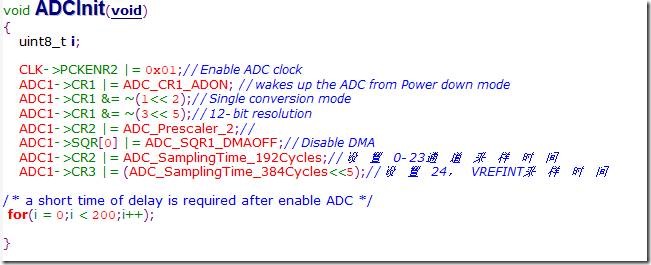
STM8L用内部参考电压做AD转换基准电压
# STM8L
6年前
0
7052
0
无刷直流电机正反转过零点换相
# 反电动势
# BLDC
# 换向
7年前
0
1.1W+
0
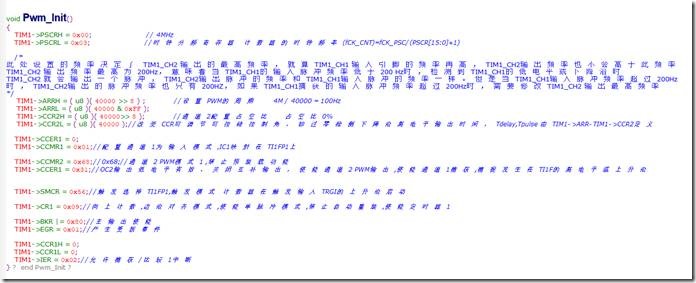
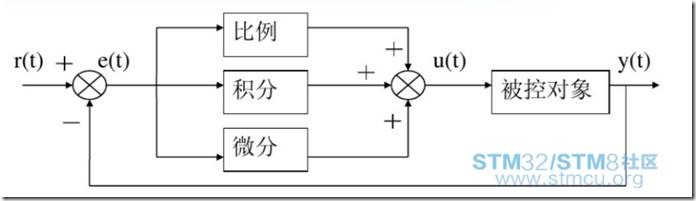
PID算法控制马达转速
# PID
7年前
0
8631
0
CH372实现HID键盘功能
# CH372
# HID
# 键盘
7年前
0
4319
1
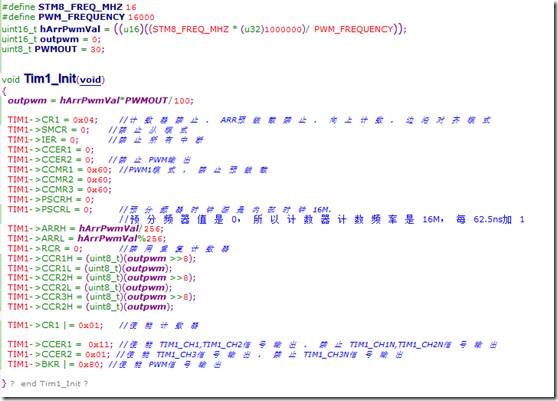
STM8S定时器1实现PWM功能
# PWM
8年前
0
6835
0
485通讯调试总结
# 485
9年前
0
5848
0
根据年月日计算星期
12年前
0
3855
0
计算时间差(精确到分钟)
12年前
0
5302
0
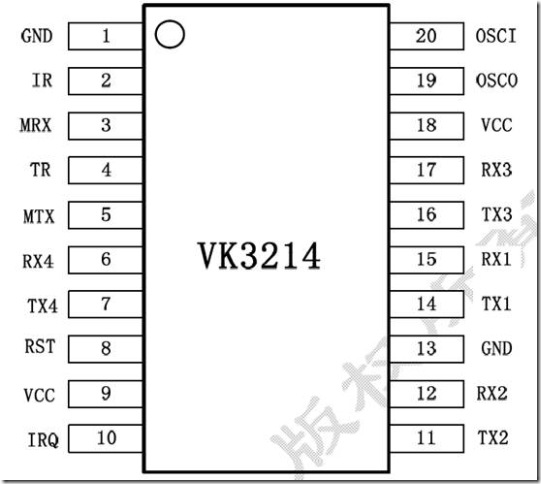
串口扩展芯片VK3214使用总结
# vk3214
12年前
0
4687
0
ATMEGA128看门狗设置
# ATMEGA
12年前
0
4233
0
加载更多
单片机方案开发(微信/Tel:13714024042)
深圳单片机方案开发(qq:1776791388)
1
M1卡使用过程中常见问题及处理建议(转)
yw912
12年前
2
CPU卡调试总结
yw912
12年前
3
MDK 出现#68-D: integer conversion resulted in a change of sign(转)
yw912
7年前
4
STM32模拟16BIT并口驱动3.0’TFT屏(一)
yw912
11年前
5
无刷直流电机正反转过零点换相
yw912
7年前
6
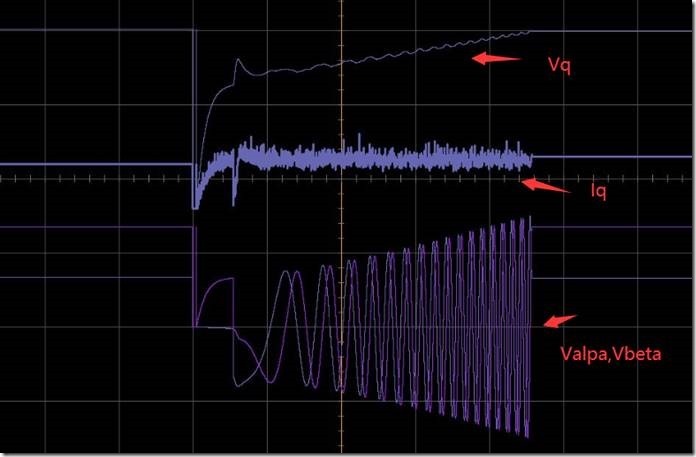
无感FOC启动之强拖
yw912
2年前
分类目录
分类目录
选择分类目录
ARM (24)
RFID (11)
UCOS-II (16)
一日一图 (7)
单片机 (18)
方案 (19)
未分类 (4)
杂文 (6)
电机 (24)
标签
485
12864LCD
AM29LV160DB
ATMEGA
CH372
cortex-m3
CPU
cpu卡
EMC
FIQ
FOC
HID
IAP
ID卡
K9F1208
lpc1768
lwip
M1
PID
ping
PWM
RAM
rc531
S3C2440
SDARM
stm32
TCP
TCPIP
TFT
ucos
ucos-ii
UDP
USB
vk3214
w25q128
中断优先级
二代身份证
反电动势
地址分配
堆栈
堆栈对齐
扩展
电子钱包
移植
维根
功能
登录
文章
RSS
评论
RSS
WordPress.org
文章归档
2025年4月
2025年1月
2024年12月
2024年8月
2024年7月
2024年5月
2024年4月
2023年10月
2023年3月
2023年2月
2023年1月
2022年12月
2022年10月
2022年9月
2022年8月
2022年7月
2022年6月
2022年5月
2022年4月
2022年3月
2021年2月
2020年6月
2020年5月
2020年4月
2020年1月
2019年12月
2019年11月
2019年4月
2019年3月
2019年2月
2018年9月
2018年5月
2018年4月
2018年3月
2018年2月
2018年1月
2017年11月
2017年10月
2017年9月
2017年8月
2017年3月
2016年12月
2015年7月
2015年6月
2015年5月
2015年1月
2014年12月
2014年11月
2014年10月
2014年9月
2014年8月
2014年7月
登录
注册
记住登录
找回密码
登录
注册