包含"2024"的全部内容
无刷电机方波驱动过流保护与电流采样要点
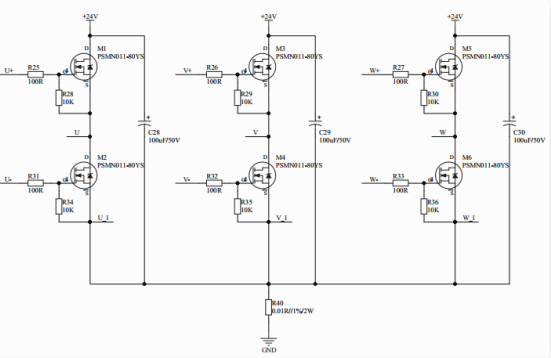
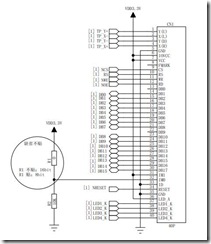
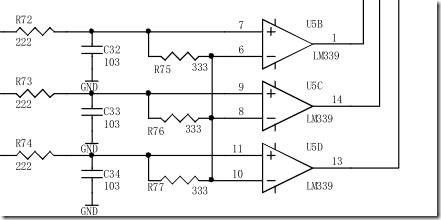
过流保护# 正常运转之后,理论上电机反电动势等于电源电压,电机绕组上的电压等于电源电压减去反电动势等于零,但是由于存在铁损,铜损和摩擦等,反电动势不等于电源电压,所以绕组上的...
FOC扇区划分和3电阻采样电流方向

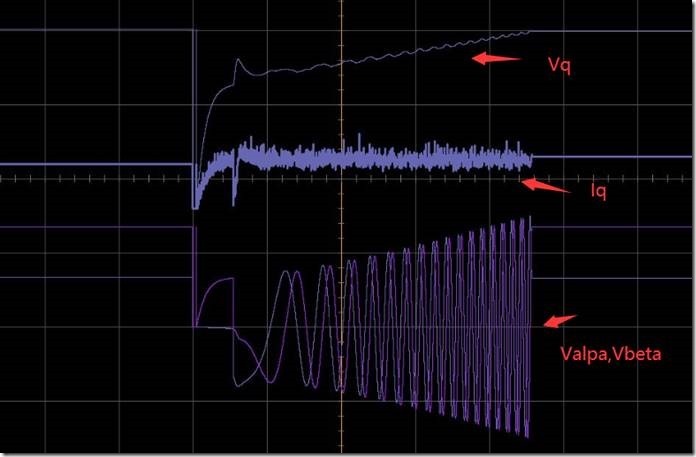
FOC的电流检测直接关系到电机的运行效果。在Clarke变换,Park变换,反Park变换,7段式SVPWM波形输出调好后,给一个固定的Vq值,Vd=0,反Park变换后得到Val...
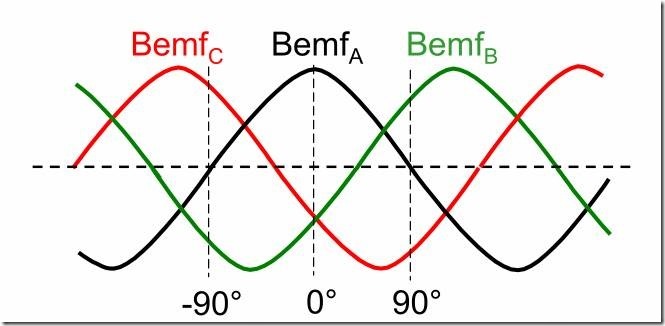
如何确定无刷电机ABC相序
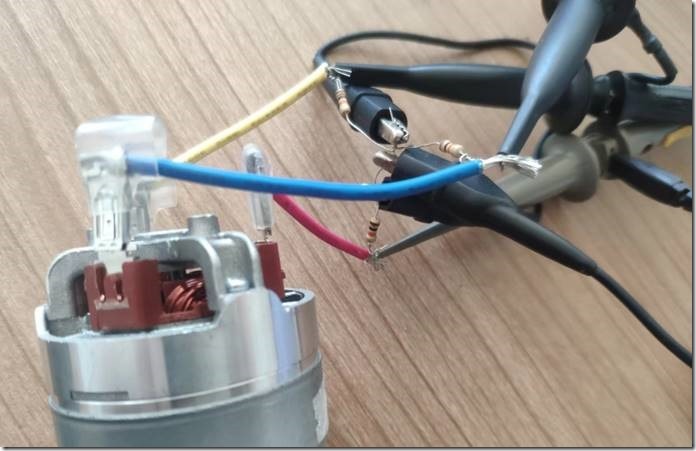
有时候调无刷电机,没有电机的资料,可以用反电动势波形来确定电机的ABC相序。如图所示,用3个10K电阻分别接到电机的三相线上,然后把3个10K电阻接在一起做为中性点。示波器三个探头...
FOC中0电角度和反电动势的关系
FOC中,电角度至关重要,无感FOC中,使用各种观测器的目的就是为了准确估算转子的电角度。电角度估算不准会导致电机无法运行或者运行不平稳。要准确估算电角度,首先要确定好0电角度。S...
无感FOC启动之强拖
无感FOC启动,定位之后需要强拖,使电机运行到一定速度,产生反电动势后,使用观测器得到反向电动势,然后根据反向电动势计算当前转子的角度和速度。强拖要使能电流闭环,Iqref设定为额...
Pid抗积分饱和程序
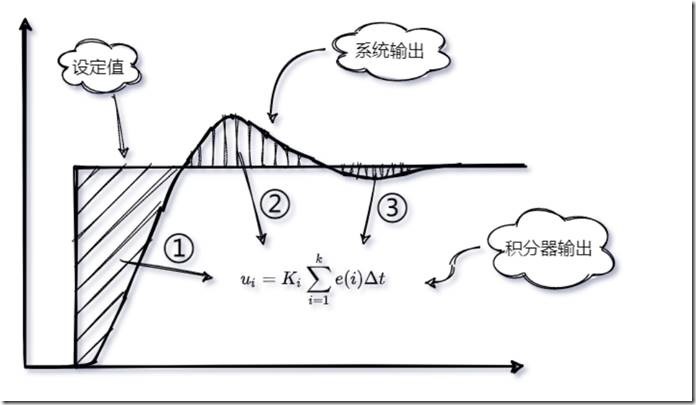
PID概念PID(比例-积分-微分)算法是一种广泛应用在控制工程中的反馈控制算法,主要用于调节系统的输出以达到期望的目标值。PID算法的核心是通过计算并结合三个基本控制动作:比例、...
反正切CORDIC计算

无感无刷电机使用FOC驱动时,需要通过反电动势计算转子电角度θ = arctan (-e α , e β )如果使用math.h的atan()函数,计算量大,耗时长,FOC每次中断...