左手定则:
位于磁场中的载流导体,会受到力的作用,力的方向可按左手定则确定,

伸开左手,使大拇指和其余4指垂直,手心面向N极,4指顺着电流的方向,那么大拇指所指方向就是载流导体在磁场中的受力方向。力的大小为:
F=BIL
B为磁感应强度(T),I为电流大小(A),L为导体有效长度(M),F为力的大小(N)。
考虑到一个线圈往往有2个有效边,在磁场中它们的受力方向正好相反,它们所产生的转矩T是以旋转轴为中心,其大小由下式决定:
T=2rF=2rBIL
转矩T的单位是N.M,r是轴中心到各导体的距离(m)。
对某一特定电动机而言,其导体总数,每根导体的有效长度,电机的半径均已确定,且磁感应强度B取决于永久磁铁的磁性材料及磁路结构,对某一台具体的电机而言,也是一个常数,所以转矩可以表示为:
T=Kt*I
Kt(N*m/A)为电机的转矩常数。电机的Kt越大,单位电流所产生的转矩就越大,电机产生一定转矩需要的电流就越小。
右手定则:
电机中的导体因做切割磁力线的运动会在其中感应出电动势E,其大小为:
E=vBL
V为导体的运动速度(m/s),B为磁感应强度(T),L为导体的有效长度(m)

伸开右手,使大拇指和其余4指垂直放在一个平面上,把手心面向N极,大拇指对着导体运动方向,那么4指所指方向就是该导体在磁场中所产生的电动势方向。
若电机以角速度ω(rad/s)旋转,则速度v=ωr,r是导体所在位置至旋转中心的距离(m)。
于是E=ωrBL,若导体总数是Z,它们互相串联,则总反电动势E=ωrBLZ。
同样,对某一台具体的电动机而言,rBLZ为反电动势常数Ke,则
E=Keω。
Kt反映了电能转换为机械能的能力强弱,Ke反映机械能转换为电能的能力强弱。在同一台电机里面,上述两种过程都蕴含在其中,电机处于电动状态时,表现为电能向机械能转换起主导作用,电机在制动时,处于发电状态,表现为机械能向电能转换起主导作用。
反电动势的概念:反电动势是指由反抗电流发生改变的趋势而产生电动势。反电动势一般出现在电磁线圈中,如继电器线圈、电磁阀、接触器线圈、电动机、电感等。
反电动势也称为反抗电动势,当电动机匀速运行时可以显著地减小电枢电流。
反电动势注意事项
(1)如果电动机工作中由于机械阻力过大而停止转动,这时没有了反电动势,电阻很小的线圈直接接在电源两端,电流会很大,很容易烧毁电动机。
(2)当电动机所接电源电压比正常电压低很多时,此时电动机线圈也不转动,无反电动势产生,电动机也很容易烧坏
反电动势计算公式
Ф为磁通,n为电机转速(r/min)
所以E/n=Ceф,
而反电动势也可以表示为E=Ke*n,
E/n就是反电动势系数Ke,
所以Ke= Ceф;
电势常数Ce=2pW/15α;
W为电枢绕组每相串联匝数,p为极对数,α为计算极弧系数。
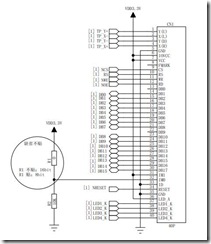
无刷直流电机等效电路图如下:

由上图得到无刷直流电机的数学模型方程如下:
Ua=R*ia+Ldia/dt+Ea+Un
Ub=R*ib+Ldib/dt+Eb+Un
Uc=R*ic+Ldic/dt+Ec+Un
式中Ua,Ub,Uc,Un分别为三相端电压和中点电压,R,L为三相电枢绕组电阻和电感,Ea,Eb,Ec为三相反电动势,ia,ib,ic为三相绕组电流。
电机的机械运动方程:
Te-TL-fω=Jdω/dt
Te和TL分别是电磁转矩和负载转矩,J为转子的转动惯量,f为阻尼系数。ω为角速度。
电动势平衡方程式为:
U=E+Iacp*racp+△U
U为电源电压,E为电枢反电动势,Iacp为平均电枢电流,racp为电枢绕组的平均电阻,△U是功率管饱和压降。
转矩平衡方程式:
Te=T2+T0+Jdω/dt
Te为电磁转矩,T2为输出转矩,T0为摩擦转矩,J为转动部分(转子和负载)的转动惯量(kg*m2), ω为角速度(rad/s).