Lpc1768移植UCOS-II(三)
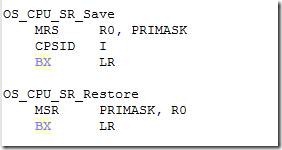
三、移植OS_CPU_A.ASM 1、移植OS_CPU_SR_Save() OS_CPU_SR_Restore() OS_CPU_SR_Save()保存当前的开关中断状态到R0,...
Lpc1768移植UCOS-II(二)

二、移植OS_CPU_C.C 1、头文件包含, ucos_ii.h中包含了头文件os_cpu.h,os_cpu.h中有一段代码如下: 在OS_CPU_C.C中定义宏OS_CPU...
Lpc1768移植UCOS-II(一)
UCOS-II在不同芯片上的移植,和处理器相关的文件有 OS_CPU.H OS_CPU_A.ASM OS_CPU_C.C 这几个文件的一些函数或代码要根据芯片和编译器的特效来修改。...
STM32+UCOS-II实现临界区不关闭重要中断
在ARM7内核芯片中,在临界区不关闭快速中断,可以避免丢失重要的中断信号。STM32要实现类似功能,需要用到BASEPRI寄存器。 比如一个产品需要外接维根读头,STM32利用外部...
Lwip在UCOS-II上的移植(三)
移植网络驱动程序。在netif文件夹下有ethernetif.c,就是网络芯片的驱动程序,需要对照实际使用的网络芯片修改。下面是DM9000A的在lwip下的驱动的程序。 /* D...
Lwip在UCOS-II上的移植(二)
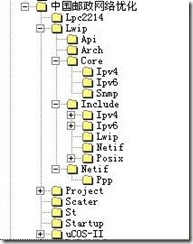
把下载的Lwip文件夹放到项目文件中,项目文件夹入下图: Lwip包含的功能: 1、 ARP协议,以太网地址解析协议 2、 IP协议,包括IPv4和IPv6,支持IP分片与重装,...
Lwip在UCOS-II上的移植(一)
LwIP是Light Weight (轻型)IP协议,有无操作系统的支持都可以运行。LwIP实现的重点是在保持TCP协议主要功能的基础上减少对RAM 的占用,它只需十几KB的RAM...
UCOS-II OS_CPU_IRQ_ISR函数移植
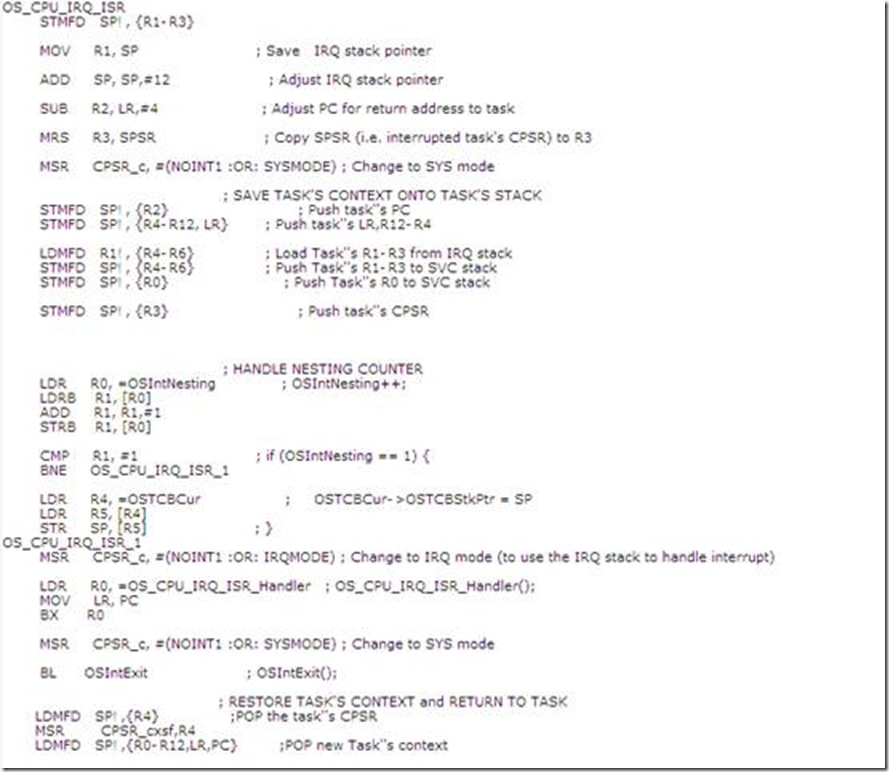
在有中断发生时,程序跳到OS_CPU_IRQ_ISR处执行。OS_CPU_IRQ_ISR函数在OS_CPU_A.S中。 在分析这个移植代码前,先了解下发生IRQ中断时,ARM的处...
UCOS-II OSIntCtxSw函数移植
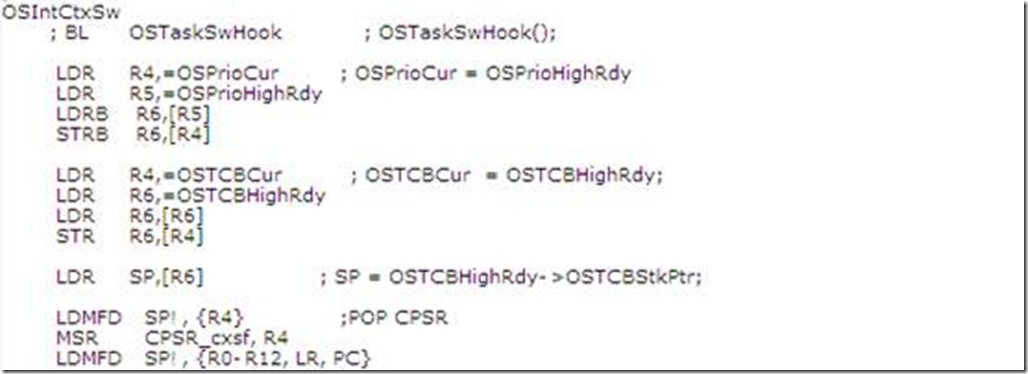
OSIntCtxSw()的代码的OSCtxSw()下半部分的代码基本上一样。因为OSIntCtxSw()是在OSINTEXIT()中调用的。也就是在中断服务程序中调用的。在进入中断...
UCOS-II OSStartHighRdy函数移植
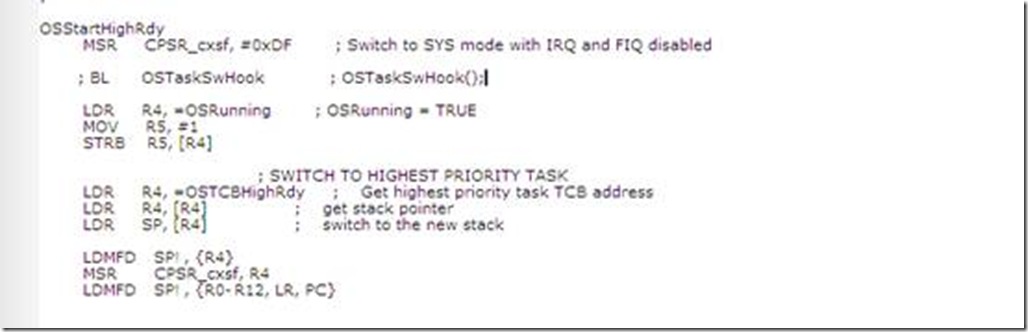
UCOS-II启动多任务环境的函数是OSStart();用户在调用OSStart()前,必须已经建立了一个或多个任务。OSStart()最终调用OSStartHighRdy()运行...
UCOS-II任务堆栈初始化函数分析与移植
UCOS-II的在建立任务函数中要对新建任务的堆栈进行初始化。堆栈初始化函数原型是: OS_STK *OSTaskStkInit (void (*task)(void *pd), ...
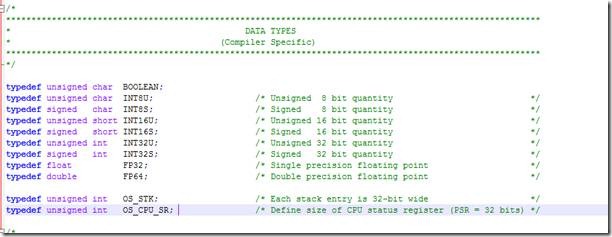
UCOS-II中数据类型移植
在OS_CPU.H文件中,定义了UCOS系统使用的数据类型,在ARM中移植时 typedef unsigned char BOOLEAN; typedef unsigned cha...