lpc1768共5篇
分类
LPC1768 内部RTC程序
typedef struct{ uint8_t RTC_Sec; uint8_t RTC_Min; uint8_t RTC_Hour; uint8_t RTC_Mday; uint...
LPC1768读写W25Q128程序
uint8_t W25QXX_Buf[4096]; GPIO设置 /*SPI pin set*/ PinCfg.Funcnum = PINSEL_FUNC_3; PinCfg.Po...
Lpc1768移植UCOS-II(三)
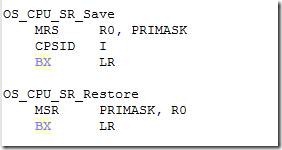
三、移植OS_CPU_A.ASM 1、移植OS_CPU_SR_Save() OS_CPU_SR_Restore() OS_CPU_SR_Save()保存当前的开关中断状态到R0,...
Lpc1768移植UCOS-II(二)

二、移植OS_CPU_C.C 1、头文件包含, ucos_ii.h中包含了头文件os_cpu.h,os_cpu.h中有一段代码如下: 在OS_CPU_C.C中定义宏OS_CPU...
Lpc1768移植UCOS-II(一)
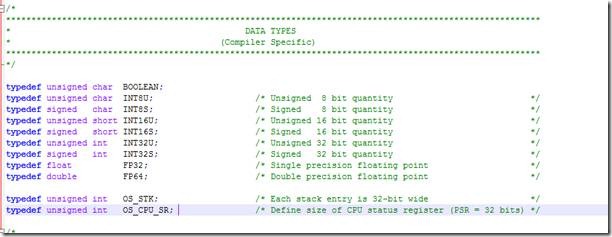
UCOS-II在不同芯片上的移植,和处理器相关的文件有 OS_CPU.H OS_CPU_A.ASM OS_CPU_C.C 这几个文件的一些函数或代码要根据芯片和编译器的特效来修改。...