PID控制有两种拓扑结构,串联结构和并联结构。
并联结构如下图:

表达式为:
Output(t)=Kp*Error(t)+Ki∫Error(t)
对上式进行拉氏变换
Output(s)=Kp*Error(s)+Ki*Error(s)/s
Output(s)/Error(s)=Kp+Ki/s
该系统有一个0极点,零点为-Ki/Kp
串联结构如下图:

Output(t)=Ka*Error(t)+Ka*kb∫Error(t)
对上式进行拉氏变换
Output(s)=Ka*Error(s)+ Ka*kb *Error(s)/s
Output(s)/Error(s)=Ka+ Ka*kb /s
Ka,Kb代表串联结构中的Kp,Ki
该系统有一个0极点,零点为-Ki
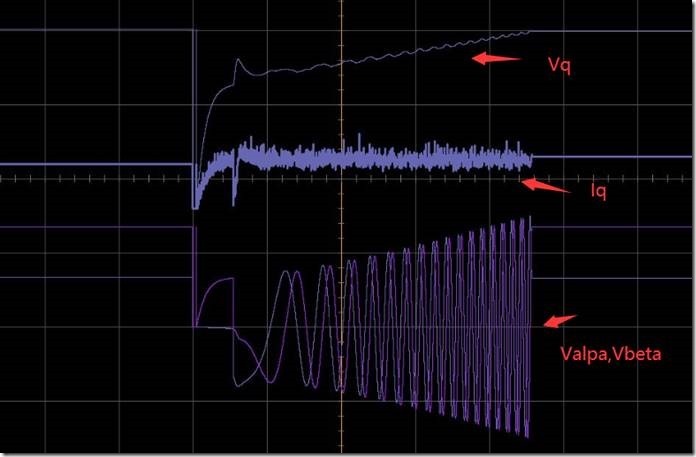
PID调试参考波形:





© 版权声明
文章版权归作者所有,未经允许请勿转载。
THE END
喜欢就支持以下吧